
 "UW researchers develop flexible shear force and vibration sensor for use in robots and prosthetics")
Scientists have developed a flexible sensor “skin” that can be stretched over any part of a robots body or prosthetic and lets them successfully grasp and manipulate objects. The bio-inspired robot sensor skin, developed by researchers from University of Washington ( **UW** ) in the US, mimics the way a human finger experiences tension and compression as it slides along a surface or distinguishes among different textures. It measures this tactile information with similar precision and sensitivity as human skin, and could vastly improve the ability of robots to perform everything from surgical and industrial procedures to cleaning a kitchen. The skin, described in the journal Sensors and Actuators A: Physical, accurately conveys information about shear forces and vibration that are critical to successfully grasping and manipulating objects. [caption id=“attachment_4155531” align=“alignnone” width=“825”] 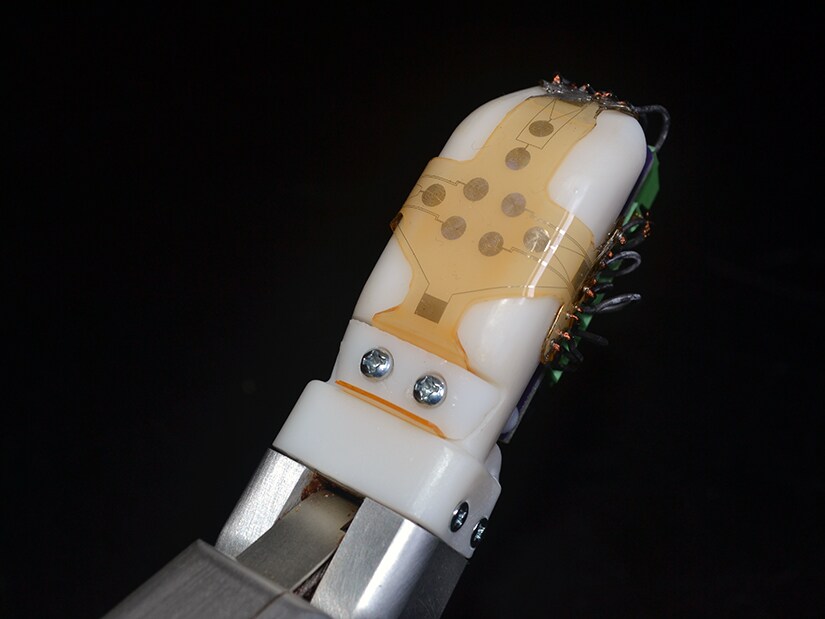 Image: University of Washington[/caption] “Robotic and prosthetic hands are really based on visual cues right now, such as, Can I see my hand wrapped around this object? or Is it touching this wire? But that is obviously incomplete information,” said Jonathan Posner, professor of mechanical engineering and of chemical engineering at UW. If a robot is going to dismantle an improvised explosive device, it needs to know whether its hand is sliding along a wire or pulling on it, Posner said. “To hold on to a medical instrument, it needs to know if the object is slipping. This all requires the ability to sense shear force, which no other sensor skin has been able to do well,” Posner added. The new stretchable electronic skin is made from the same silicone rubber used in swimming goggles. The rubber is embedded with tiny serpentine channels- roughly half the width of a human hair-filled with electrically conductive liquid metal that will not crack or fatigue when the skin is stretched, as solid wires would do, researchers said. When the skin is placed around a robot finger or end effector, these microfluidic channels are strategically placed on either side of where a human fingernail would be. As you slide your finger across a surface, one side of your nailbed bulges out while the other side becomes taut under tension, researchers said. The same thing happens with the robot or prosthetic finger, the microfluidic channels on one side of the nailbed compress while the ones on the other side stretch out, they said. “By mimicking human physiology in a flexible electronic skin, we have achieved a level of sensitivity and precision that is consistent with human hands, which is an important breakthrough,” Posner said. “The sense of touch is critical for both prosthetic and robotic applications, and that is what we are ultimately creating,” Posner added.
The “skin” can be stretched over any part of a robots body or prosthetic and lets them successfully grasp and manipulate objects.
Advertisement
End of Article




](https://images.firstpost.com/wp-content/uploads/2017/10/robot-skin-close-up-380.jpg){kind=link}